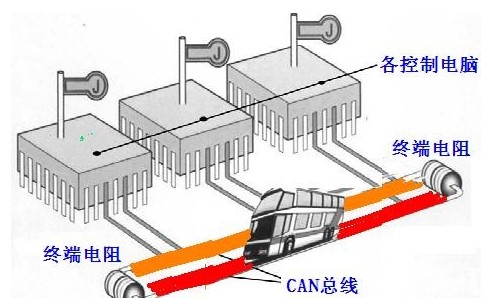
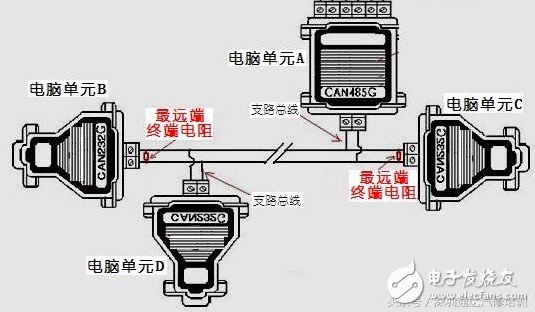
This article is mainly about the relevant introduction of the can bus, and focuses on the detailed description of the can termination resistance. CAN is the abbreviation of Controller Area Network (CAN). It was developed by the German company BOSCH, which is known for its research and development and production of automotive electronic products, and eventually became an international standard (ISO 11898), which is the most widely used internationally One of the field buses. In North America and Western Europe, the CAN bus protocol has become the standard bus for automotive computer control systems and embedded industrial control local area networks, and has the J1939 protocol designed specifically for large trucks and heavy machinery vehicles with CAN as the underlying protocol. CAN bus is a serial data communication protocol developed by German BOSCH company in the early 1980s to solve the data exchange between numerous control and test instruments in modern cars. It is a multi-master bus, and the communication medium can be dual Stranded wire, coaxial cable or optical fiber. The communication rate can reach up to 1Mbps. Complete framing of communication data The CAN bus communication interface integrates the physical layer and data link layer functions of the CAN protocol, which can complete the framing of communication data, including bit filling, data block coding, cyclic redundancy checking, priority discrimination and other tasks. Make the number of nodes in the network unlimited in theory One of the biggest features of the CAN protocol is to abolish the traditional station address coding, and instead encode the communication data block. The advantage of using this method allows the number of nodes in the network to be theoretically unlimited. The identifier of a data block can be composed of 11-bit or 29-bit binary numbers, so 2 or more different data blocks can be defined. This way of encoding according to data blocks can also enable different nodes to receive the same data at the same time, which is very useful in distributed control systems. The length of the data segment is up to 8 bytes, which can meet the general requirements of control commands, working status and test data in the general industrial field. At the same time, 8 bytes will not occupy the bus for too long, thus ensuring real-time communication. The CAN protocol adopts CRC inspection and provides corresponding error handling functions to ensure the reliability of data communication. CAN's outstanding characteristics, extremely high reliability and unique design are particularly suitable for the interconnection of industrial process monitoring equipment. Therefore, it has received more and more attention from the industry and has been recognized as one of the most promising fieldbuses. Can realize free communication between nodes The CAN bus adopts a multi-master competitive bus structure, and has the characteristics of a serial bus with multi-master operation and decentralized arbitration and broadcast communication. Any node on the CAN bus can actively send information to other nodes on the network at any time without distinction of priority, so free communication between nodes can be achieved. The CAN bus protocol has been certified by the International Organization for Standardization, the technology is relatively mature, the control chip has been commercialized, and the cost performance is high. It is especially suitable for data communication between distributed measurement and control systems. The CAN bus plug-in card can be arbitrarily inserted into the PC AT XT compatible machine to easily form a distributed monitoring system. Simple structure Only 2 wires are connected to the outside, and the error detection and management module is integrated inside. Transmission distance and rate CAN bus characteristics: (1) Data communication is not divided into master and slave. Any node can initiate data communication to any other (one or more) nodes. The order of communication is determined by the priority of each node's information. High priority nodes Information is communicated in 134μs; (2) When multiple nodes initiate communication at the same time, the one with low priority will avoid the one with high priority and will not cause congestion on the communication line; (3) The communication distance can be as long as 10KM (the rate is lower than 5Kbps) The rate can reach 1Mbps (communication distance is less than 40M); (4) CAN bus transmission medium can be twisted pair, coaxial cable. CAN bus is suitable for large data volume short-distance communication or long-distance small data volume, with high real-time requirements, multi-master and multi-slave or equal use in the field of each node. Technology Introduction Arbitration To process data in real time, it is necessary to transmit the data quickly, which requires a higher speed in the physical transmission path of the data. When several stations need to send data at the same time, fast bus distribution is required. There is a big difference in real-time processing of emergency data exchanged over the network. A fast-changing physical quantity, such as the load of a car engine, will transmit data more frequently and require a shorter delay than a relatively slow-changing physical quantity such as the temperature of a car engine. The CAN bus uses a message as a unit for data transmission. The priority of the message is combined in an 11-bit identifier, and the identifier with the lowest binary number has the highest priority. Once this priority is established during system design, it cannot be changed. Conflicts in bus reads can be resolved by bit arbitration. For example, when the identifiers 0111111, 0100100, and 0100111 undergo bit arbitration, the 0100100 message will be tracked, and the remaining messages will be discarded. The specific process is: when several stations send messages at the same time, the message identifier of station 1 is 0111111, the message identifier of station 2 is 0100110, and the message identifier of station 3 is 0100111, all identifiers are the same The two bits 01, until the third bit is compared, the message of station 1 is discarded because its third bit is high, while the third bit of the messages of the other two stations is low. The 4, 5, and 6 bits of the station 2 and station 3 messages are the same, and the station 3 message is not discarded until the 7th bit. Note that the signals in the bus continue to track the messages of the station that finally obtained the right to read the bus. In this example, the message of station 2 is tracked. The advantage of this non-destructive bit arbitration method is that the initial part of the message has been transmitted on the network before the network finally determines which station's message is transmitted. All stations that have not obtained the right to read the bus become the receiving station with the highest priority message, and will not send messages before the bus is free again. CAN has higher efficiency because the bus is only used by those stations whose requests are pending, and these requests are processed in order according to the importance of messages in the entire system. This method has many advantages when the network load is heavy, because the priority of the bus read has been placed in each message in order, which can ensure a lower individual hidden time in the real-time system. For the reliability of the master station, since the CAN protocol implements decentralized bus control, all major communications, including bus read (permission) control, are completed in several times in the system. This is the only way to achieve a high-reliability communication system. Comparison of CAN and other communication schemes In practice, there are two important bus allocation methods: allocation on a schedule and allocation on demand. In the first method, regardless of whether each node applies for the bus, each node is allocated according to the maximum period. As a result, the bus can be assigned to each station and is the only station, regardless of whether it is performing bus access immediately or performing bus access at a specific time. This will ensure a clear bus assignment during bus access. In the second method, the bus is allocated to a station according to the basic requirements of transmitting data, and the bus system is allocated according to the transmission desired by the station (for example: EthernetCSMA/CD). Therefore, when multiple stations request bus access at the same time, the bus will terminate the requests of all stations, and no one station will get the bus allocation at this time. In order to allocate the bus, more than one bus access is necessary. CAN realizes the bus distribution method, can guarantee that when different stations apply for the bus access, the bus distribution is clearly carried out. This bit arbitration method can solve the collision problem that occurs when two stations send data at the same time. Different from the message arbitration of the Ethernet network, CAN's non-destructive method of resolving bus access conflicts ensures that the bus is not occupied when no useful messages are transmitted. Even when the bus is under heavy load, bus access that prioritizes message content has proven to be an effective system. Although the transmission capacity of the bus is insufficient, all unresolved transmission requests are processed in order of importance. In a network such as CSMA/CD, such as Ethernet, the system often crashes due to overload, and this situation does not happen in CAN. CAN message format The message transmitted on the bus consists of 7 parts per frame. The CAN protocol supports two message formats. The only difference is that the length of the identifier (ID) is different. The standard format is 11 bits and the extended format is 29 bits. In the standard format, the start bit of the message is called the start of frame (SOF), followed by an arbitration field composed of an 11-bit identifier and a remote transmission request bit (RTR). The RTR bit indicates whether it is a data frame or a request frame. There is no data byte in the request frame. The control field includes the identifier extension bit (IDE), which indicates whether it is a standard format or an extended format. It also includes a reserved bit (ro) for future expansion. Its last four bits are used to indicate the length of the data in the data field (DLC). The data field ranges from 0 to 8 bytes, followed by a cyclic redundancy check (CRC) to detect data errors. The response field (ACK) includes the response bit and the response separator. The two bits sent by the sending station are both recessive levels (logic 1). At this time, the receiving station that correctly receives the message sends the master control level (logic 0) to cover it. In this way, the sending station can ensure that at least one station in the network can receive the message correctly. The end of the message is marked by the end of the frame. There is a short interval between two adjacent messages. If no station is accessing the bus at this time, the bus will be in an idle state. Composition of CAN data frame Remote frame The remote frame consists of 6 fields: frame start, arbitration field, control field, CRC field, response field and frame end. There is no data field in the remote frame. The RTR bit of the remote frame must be hidden. The data value of DLC is independent, it can be any value from 0 to 8, which is the data length of the corresponding data frame. Error frame The error frame is composed of two different fields. The first field is obtained by superimposing the error flags from each station, and the second field is the error delimiter. The error flag has two forms: Active error flag (Active error flag), composed of 6 consecutive display bits Passive error flag, composed of 6 consecutive hidden bits Error delimiter includes 8 hidden bits Overload frame Overload frame includes two position fields: overload mark and overload delimiter Overload conditions for sending overload frames: Request to delay the next data frame or remote frame Manifestation detected in the intermittent field The overload flag is composed of 6 display positions The overload delimiter consists of 8 hidden bits Data error detection Unlike other buses, the CAN protocol cannot use response information. In fact, it can signal any errors that occur. The CAN protocol can use five methods to check errors, of which the first three are based on message content checking. 3.4.1 Cyclic Redundancy Check (CRC) Adding a redundancy check bit to a frame of message can ensure that the message is correct. The receiving station can judge whether the message has errors through the CRC. 3.4.2 Frame Check This method uses the bit field to check the format and size of the frame to determine the correctness of the message, and is used to check format errors. 3.4.3. Response error As mentioned earlier, the received frame is confirmed by the receiving station with an explicit response. If the sending station does not receive the response, it indicates that the receiving station has found an error in the frame, that is, the ACK field has been damaged or the message in the network has not been received by the station. The CAN protocol can also detect errors by means of bit checking. 3.4.4 Bus detection Sometimes, a node in CAN can monitor its own signal. Therefore, the station that sends the message can observe the bus level and detect the difference between the sent bit and the received bit. 3.4.5 Bit padding Each bit in a frame of message is represented by a non-return-to-zero code, which can ensure the maximum efficiency of bit coding. However, if there are too many bits of the same level in a frame of messages, synchronization may be lost. To ensure synchronization, synchronization is generated by bit stuffing. After five consecutive equal bits, the sending station automatically inserts a complementary complementary bit; when receiving, this stuffing bit is automatically discarded. For example, after five consecutive low-level bits, CAN automatically inserts a high-level bit. CAN checks for errors through this coding rule. If there are 6 identical bits in a frame of message, CAN knows that an error has occurred. If at least one station detects one or more errors through the above method, it will send an error flag to terminate the current transmission. This can prevent other stations from receiving erroneous messages and ensure the consistency of messages on the network. When a large amount of sending data is terminated, the sending station will automatically resend the data. As a rule, the transmission is restarted within 23 bit periods after the error is detected. On special occasions, the recovery time of the system is 31 bit cycles. However, there is a problem with this method, that is, an error-generating station will cause all data to be terminated, including correct data. Therefore, if self-monitoring measures are not taken, the bus system should adopt a modular design. For this reason, the CAN protocol provides a way to distinguish accidental errors from permanent errors and local station failures. This method can be achieved by statistically evaluating the error station to determine the error of a station itself and entering an operating method that will not adversely affect other stations. That is, the station can shut down itself to prevent normal data from being mistakenly regarded as Incorrect data was terminated. Hard synchronization and resynchronization Hard synchronization is only carried out when the transition from the invisible bit to the dominant bit occurs under the condition of the bus idle state, indicating the start of the message transmission. After hard synchronization, the bit time counter restarts counting with the synchronization segment. Hard synchronization forces the transition that has occurred to be placed in the re-started bit time synchronization segment. According to the synchronization rules, if a hard synchronization occurs within a certain bit time, no resynchronization will occur within that bit time. Resynchronization may cause phase buffer segment 1 to be extended or phase buffer segment 2 to be shortened. The upper limit of the extension time or shortening time of the two phase buffer segments is given by the resynchronization jump width (SJW). The elevator communication system has evolved from the initial parallel communication and RS485 communication to the widely used CAN bus communication in the past few decades. Parallel communication means that each control signal needs to occupy a separate line to transmit to the elevator main controller. As the number of elevator floors increases, the number of cables also doubles. RS485 bus communication establishes contact between the main controller and the car top, control box, and outbound calls through the communication mode of command and response; the elevator main controller periodically sends out query signals to each position controller, and then each sub-controller returns Send their respective status. RS485 uses 3 wires to realize serial communication. Although it simplifies the field wiring, it has shortcomings such as flexibility and poor reliability, so it is gradually replaced by the CAN bus. CAN field bus has the following characteristics: (1) Multi-master bus, each node controller can actively send information to other nodes on the network at any time; (2) Non-destructive bus arbitration technology is adopted, and the node with higher priority is preferred Data transmission can meet real-time requirements; (3) It has the function of point-to-point, point-to-multipoint and global broadcasting to transmit data; (4) CAN bus data error rate is extremely low, a serious error occurs in a node, and it can automatically leave the bus. Other operations on the bus are not affected; (5) The communication distance is long, up to 10km (5Kb/s), the communication rate can reach up to 1Mb/s (40m), and the actual number of nodes can reach 110; (6) The CAN bus has only two wires, and the new node can be directly connected to the bus, which is easy to install. At present, CAN bus has two main applications in elevators. One is a single elevator communication control system, that is, the communication of the car, machine room, and each floor of a single elevator; the second is the group control elevator communication control system, namely Communication between elevators. In addition, the remote monitoring system of some elevators can also use CAN bus communication. 3 Signal reflection and impedance matching 3.1 Signal reflection According to the principle of transmission line, when the signal encounters impedance discontinuity during propagation (such as entering the load from the transmission line), a reflected wave will be generated. The superimposition of the reflected signal on the original signal will change the shape of the original signal, causing loss or distortion of the signal, and affecting communication The quality can't even communicate normally. Two-wire transmission line equation: (1) Where: r, l, g, c are the resistance, inductance, conductance and capacitance per unit length of the transmission line, respectively V (z, t) and I (z, t) are the voltage and current at position z and t, respectively t, z are the time axis and the displacement axis, respectively In the lossless transmission line, r=g=0, substituting into equation (1) and decoupling: (2) The solution form of equation (2) is: (3) Where: ZC is the characteristic impedance of the transmission line v is the propagation speed of the signal on the transmission line It can be seen from equation (3) that the voltage and current in the transmission line have two components. The displacement z of the component is in the same direction as the time t, which is the forward traveling wave; the middle displacement z is the reverse of the time t, which is the backward direction. Traveling waves, where forward traveling waves are incident waves, and backward traveling waves are reflected waves. The reflection characteristic of the transmission line is usually expressed by the reflection coefficient ΓL: (4) 3.2 Impedance matching of elevator CAN bus It is obviously troublesome to calculate the reflection coefficient by formula (4), and we can also calculate the reflection coefficient through the system boundary conditions. Consider the situation where the signal enters the load medium from the transmission line medium, as shown in Figure 1. The current and voltage at the interface must be continuous and cannot be stepped, so there are: (5) According to Ohm's law, there are: (6) Simultaneous equations (5) (6) have: (7) It can be seen from equation (7) that when RL=ZC, Γ=0, the load does not produce a reflected signal. Therefore, when the signal enters the load from the transmission line, the condition for no reflection is that the load resistance is equal to the characteristic impedance of the transmission line, that is, RL=ZC. At this time, we call it impedance matching. It can be seen from the above analysis that the condition of elevator CAN bus impedance matching is that the load resistance on the elevator CAN bus is equal to the characteristic impedance of the transmission line. The characteristic impedance of the twisted-pair shielded wire used in the CAN bus is 60Ω. Generally, the input impedance of the CAN transceiver is as high as about 20KΩ, which is much larger than the characteristic impedance of the transmission line. Therefore, it is necessary to incorporate a resistance of approximately 60Ω between the CAN buses to achieve impedance matching. 3.3 Short-distance transmission of CAN signals Consider that the CAN communication signal is transmitted in the direction of Figure 2, the signal propagates in the z direction at the speed v, the propagation distance L, the signal rising edge slope k, and the rising edge time ts. In the case of no impedance matching, the time delay for the reflected signal to return to the output terminal. If the single time delay is very small, the reflected signal will be covered by the rising edge and will not affect the communication. It is generally believed that when the signal delay is less than 20% of ts, the reflection of the signal is acceptable. Considering that CAN communication is actually the difference between CAN_H and CAN_L, the delay is required. 4 Analysis of elevator CAN bus topology 4.1 Introduction to Network Topology The network topology of communication system generally has the following types: (1) Star topology: There must be a host in the star topology. Each extension is connected to the host through point-to-point, and the communication between the extensions must be transferred through the host. In this topology, the failure of a single extension will not affect the communication between the host and other extensions. However, since the communication between extensions must be completed through the host, once the host fails, the network communication will not work properly, so the reliability and capacity of the host are very high; in addition, each extension must pass point-to-point mode Connected to the host, the amount of cables used is large. (2) Ring topology: There is no host in the ring topology. In the ring topology, each node forms a closed loop through links between points. The transmission of data on the link is unidirectional. Each node receives data from one link and sends it out from another link. The data circulates on the network in one direction. The advantage of the ring topology is that the required medium length is relatively short; the disadvantage is that the failure of one node will cause the failure of the entire network. (3) Net topology: Each node of the net topology has one or several links connected to other nodes. There are multiple paths between nodes to transmit data. When transmitting data, it is possible to choose a relatively idle channel or bypass the point of failure, so network resources can be fully utilized. The failure of a single node or line has a small impact on the network, and the network reliability is high. But its structure is complicated and the cost is high. (4) Bus-type topology: The bus-type topology is multi-master communication, and each node sends and receives data at the same time. It uses a single bus as the transmission medium, all nodes are connected to the bus through a hardware drive interface, and data sent by any one node can be received by other nodes. The data is sent in groups, and after each node receives the data, after address recognition, the corresponding data is copied from the bus. The advantage of the bus topology is that the required cable length is short and the wiring is easy. The bus is only a transmission channel, without any processing function, high reliability of work, and convenient expansion. The disadvantage is that the scope of the system is limited. (5) Tree topology: Tree topology evolved from bus topology. Starting from the root of the tree, there can be multiple branches under each node. Many features of the tree topology are similar to the bus topology, but its faults are easier to isolate and check. 4.2 CAN bus topology The CAN high-speed standard ISO11898 adopts the bus structure as the network topology, and a terminal resistor is connected at both ends of the bus. However, in actual situations, the network topology is not a strict bus structure, and some nodes have a certain branch line length. In addition, in some applications, from the perspective of EMC, it may be better to make some adjustments to the terminal network. The following briefly introduces the characteristics of various bus topologies: (1) Dual terminal bus. In the standard dual-terminal bus network topology, a 120Ω terminal resistor is connected to both ends of the bus, and the total resistance of the bus is 60Ω. This topology structure has simple wiring, good reliability, and long transmission distance. It is currently the most commonly used bus topology on elevators. (2) Single terminal bus. The easiest way to match the CAN bus is to connect a 60Ω terminal resistor to the bus. In this topology, the bus resistance is 60Ω and the impedance is matched. However, in this topology, many nodes are actually not on the bus but on the branch line, and their transmission distance is limited. The bus length of this topology is only 50% of the bus length of the standard dual-terminal bus connection. (3) Separate the bus. Separating the bus is to divide a single terminal resistor into two resistors with the same resistance value on the basis of a dual-terminal bus, and connect the two resistors to the ground through a capacitor, as shown in Figure 3. It can be seen that separating the bus does not change the DC characteristics of the bus. There are two grounding methods for the separation bus: 1) Both terminals are separated and grounded separately. This topology can optimize the high-frequency performance of communication. However, after the two terminal resistors are grounded, an interfering loop current may be formed through the ground current. In this case, you can consider 2) Only one terminal resistance is grounded. This connection has better transmission characteristics in the range of medium frequency to low frequency. This kind of bus structure has complicated wiring and is generally only used in specific situations. (4) Multi-terminal bus. In some applications, if an additional branch needs to be added, a topology structure different from the bus structure is required. The topology at this time is similar to the star topology. In this case, multi-terminal connection can be used. The multi-terminal structure is to divide the terminal resistance (60Ω) into two or more resistors, and the resistance on the bus is still guaranteed to be 60Ω. Figure 4 shows a three-branch star topology. In this case, each branch can see a terminal, and each terminal has a resistance of 180Ω. In this topology, if one of the terminals is removed, the impedance on the bus will no longer be completely matched. However, it can still be used normally under short-distance transmission. Therefore, in this topology, the CAN bus communication distance will be much shorter than the dual-terminal topology. 4.3 Analysis of Elevator CAN Bus Topology Figure 5 is a circuit diagram of directly incorporating a matching resistance R1=60Ω into the elevator group control CAN bus. After R1 is incorporated into the bus, since the impedance of the CAN transceiver is much larger than R1, the load impedance in the bus is close to 60Ω, CAN The bus reaches impedance matching. But in this topology, assuming that A1 sends a signal to the bus, the IrIm in the circuit, the right part of the matching resistor (red) actually belongs to the branch and is not in the bus. Therefore, when its length is 》Lmax, the system will not work properly. communication. Further, CAN communication is a multi-master bus, and each node sends and receives signals at the same time. Therefore, under this topological structure, the length of both ends of the matching resistor must be less than Lmax, which will greatly shorten the maximum transmission distance of the CAN bus. Therefore, in the existing elevator CAN communication, a 120Ω terminal resistance is generally connected in parallel at both ends of the bus, as shown in Figure 6. In this topology, the total resistance of the bus is also close to 60Ω, and the bus impedance is matched. The connection distance between each node and the bus is small, and the reflection can be ignored. However, the length between the node and the bus should still be minimized, and the length should be less than Lmax. In the matching of terminal resistors, the terminal resistors must be placed at the farthest ends. If one of them is placed in the middle position, the structure is shown in Figure 7. In this topology, the CAN transceiver A1 outside the terminal resistance is on the branch, which will greatly increase the signal reflection of this node, and then affect the bus communication. It should be noted that in the above analysis, the influence of line resistance and node impedance on the bus resistance is not considered. In practical applications, the terminal resistance can be fine-tuned according to the line length and the number of nodes to make the total resistance of the CAN bus as much as possible. Close to 60Ω. 5 Conclusion This article preliminarily discusses the basic principles of elevator CAN bus terminal resistance configuration through the analysis of transmission line signal reflection and CAN bus structure. The configuration of CAN bus terminal resistance should follow the following principles: (1) The configuration of the terminal resistance should meet the impedance matching of the CAN bus, and the resistance between the buses should be equal to the characteristic impedance of the transmission line. At present, 120Ω resistors are generally added at both ends of the CAN bus. If higher requirements are required, the resistance can be fine-tuned according to the length of the bus and the number of nodes to make the resistance between the buses as close to 60Ω as possible; (2) The two terminal resistors should be The equal value is configured at the two nodes with the furthest distance between the lines; (3) The distance between the nodes and the bus should be as short as possible, and the specific allowable length will be different due to factors such as signal frequency and line resistance. In particular, this point should be paid more attention to when connecting temporary equipment nodes such as diagnostic equipment. In short, the configuration of the elevator CAN communication terminal resistance is indispensable. Increasing or reducing the resistance will cause unstable communication or even normal communication. The position of the terminal resistance should make the total resistance between the CAN buses as close as possible to the characteristic impedance of the transmission line, and the length of the unmatched part of the line should be as short as possible. Modern cars use CAN bus, which is a form of "twisted pair", distributed among different computers, called "controller area network bus" technology. The use of CAN bus system greatly simplifies the layout of the line than the traditional wiring method, and the data transmission speed is higher, smarter and more accurate. What is transmitted on the CAN bus is a high-speed information data stream, which is transmitted wave after wave like a wave. People find that when the information data stream reaches the destination or terminal, reflection occurs at the terminal, causing interference waves of information and affecting the normal transmission of information. Just like when a wave hits the coast of a breakwater, it is resisted by a hard rock, and the reflected wave will be superimposed on the wave, causing a greater impact of the wave, and also destroying the original transmission of information. How to reduce the reflection of information data flow on the computer terminal? When people observe the waves, they find that when the waves hit the beach, the soft sand will absorb the waves instead of forming reflected waves. What can be absorbed by the reflected wave of the high-speed information data stream on the CAN bus? Through a lot of experiments, it is found that at the far end of the bus, only two resistors are connected in parallel. Figure 1. The terminal resistors on the CAN bus are connected in parallel The terminal resistance on the CAN bus is connected in parallel to the bus. Putting the terminal resistance in a remote computer or separately can effectively absorb the reflected wave. In Figure 1, the resistance of the two terminals is 120Ω, and they are connected in parallel to the two ends of the CAN twisted pair bus. Therefore, the resistance between the CAN high and low wires should be 60Ω. If it is not 60Ω but 120, it means that a terminal resistor is open. If the resistance between the two CAN wires is no dome, it means that both terminal resistors are open. If the resistance between the two CAN wires is zero, it means that the two high and low buses are connected together and short-circuited. Once the terminal resistance is broken, the interference wave cannot be effectively absorbed, which will cause the signal transmitted by the bus to be unstable, which directly affects the normal operation of the relevant computer. Figure 2. Terminal resistors are connected in parallel at both ends of the CAN twisted pair bus For example, the terminal resistor of a BMW car was installed separately under the headlights of the car. A rear-end collision caused the terminal resistor connection to be disconnected, and the maintenance technician did not know its purpose, so he discarded it. As a result, the BMW sedan lost an important safety function, that is, the vehicle's anti-skid function was lost. The anti-skid warning light on the dashboard also lights up, causing the car owner to be very worried. After repeated and careful searching, the failure of the vehicle's anti-skid function was ruled out. It can be seen that the terminal resistance on the CAN bus is extremely important. In fact, measuring and judging this specific terminal power is not troublesome for every maintenance master or even car friends, and it can be easily mastered. This is the end of the related introduction about the CAN bus. If there are any deficiencies, please correct me. Related reading recommendations: one article to understand the characteristics and advantages and disadvantages of the CAN bus Related reading recommendation: CAN bus communication typical circuit schematic diagram Airis Vape,Airis Mega 2000Puffs,Airis Max 1800Puffs,Airis Chief 2600Puffs Shenzhen Zpal Technology Co.,Ltd , https://www.zpal-vape.com