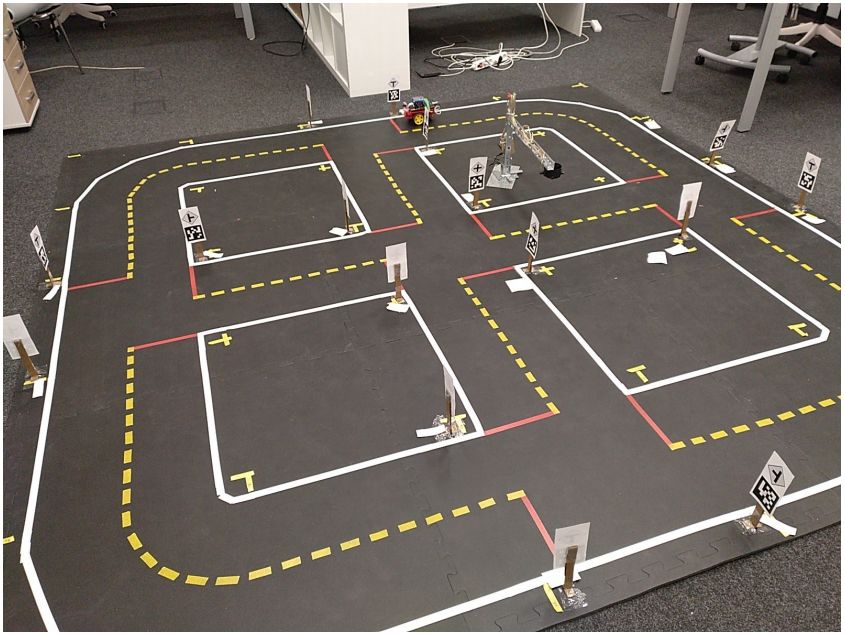
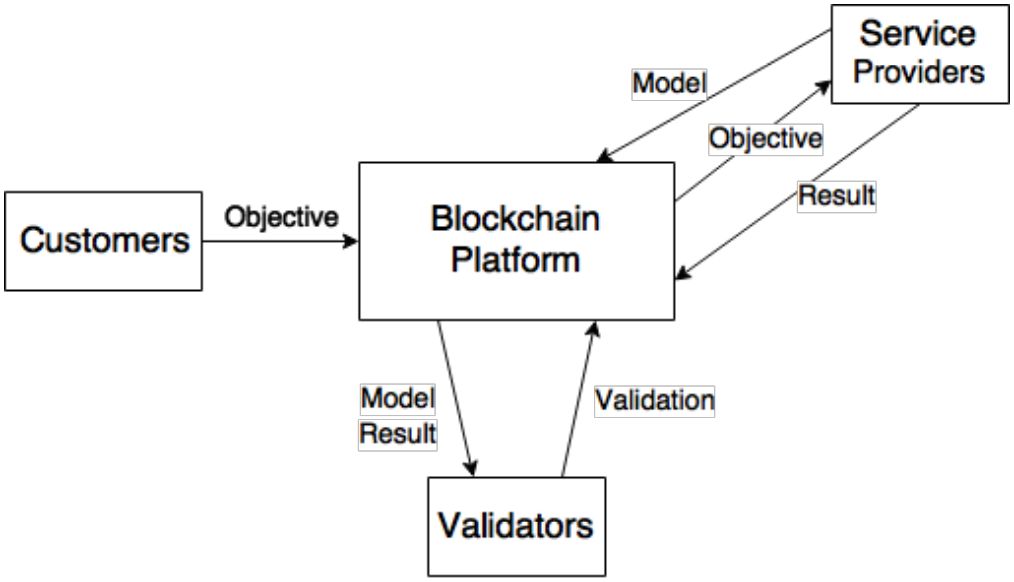
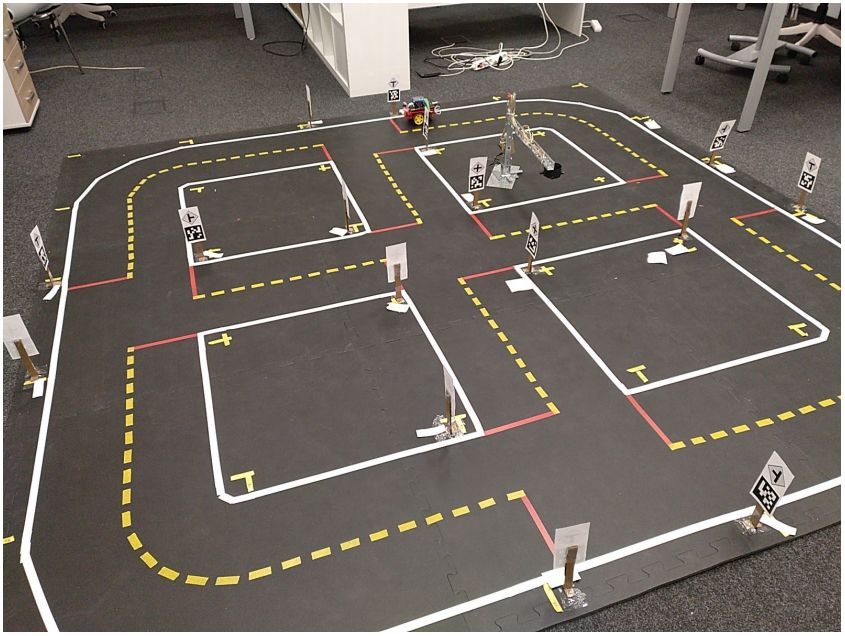
With the development of AI technology, autonomous agents have greatly improved in speed and accuracy, become more intelligent and efficient, exhibit impressive performance on various specific tasks, and successfully interact with each other. Collaborate to achieve their own independent goals. In this article, Professor Konstantin Danilov, Ruslan Rezin, Alexander Kolotov, and Ilya Afanasyev of the Institute of Robotics at the University of Innopolis in Russia proposed the concept of a decentralized trading market, which can be called “robonomicsâ€. In this market, autonomous agents can consume and produce services based on consensus agreements. So, in this market, how does a customer gain trust in the extent to which service providers perform their responsibilities? Or how to detect that the service provider failed to properly implement the responsibility and thus stop the payment transaction? Experts gave new answers to this question. In general, a decentralized trading market approach, where autonomous agents and personnel can both consume and produce services to expand their chances of achieving their goals, as part of the fourth industrial revolution, it looks like Very promising prospects. The key component of this method is the blockchain platform, which allows agents to interact through the responsibility smart contract. The reliability of the service provider usually depends on the reputation model. However, this solution will only alert the future customers to the trust of the service provider in case it cannot perform any previous responsibility properly. On the other hand, the blockchain consensus protocol may also include a verification procedure to detect incorrect execution of responsibilities in order to suspend payment transactions to problematic service providers. This paper proposes a method for verifying the responsibility of agent-based service providers in a decentralized marketplace. This method uses a mathematical model based on finite state automata and useful temporal logic attributes (Temporal Logic). Model Checking method for property). To illustrate this concept, we implemented this method in the Duckietown application: Move an autonomous mobile robot and use the next behavior validation performed at the end of a complete scenario to achieve a mission goal. Figure 1: A common scenario for interaction between autonomous agents in the responsibility life cycle. Over the past decade, autonomous agents have become smarter and more efficient in terms of speed and accuracy, have demonstrated impressive performance on a variety of specific tasks, and have successfully collaborated with each other to achieve their own independence. aims. This raises the concept of a decentralized market in which autonomous agents can consume and produce services based on consensus agreements. Due to the emergence of blockchain technology, especially the Bitcoin solution to the double-spending attack problem (Bitcoin), the concept of decentralized multi-agent system becomes feasible as long as the agent does not depend on it. For a single point of failure, and their operation is transparent to monitoring. Although the blockchain was originally introduced as a cryptocurrency solution, it inspired the developers of the Ethereum platform to come up with a new concept: smart contracts—a protocol implementation of algorithms. Soon, it became the largest platform for decentralized applications, providing new impetus for the development of market services such as selling computer processing power and distributed computing storage. Another example of a blockchain-based platform is the decentralized network of autonomous IOTAs that are oriented toward the Internet of Things (IoT) market. Although the items we discussed became common, they all focused on specific types of autonomous agents, which severely limited the available services. The AIRA project first introduced the concept of a decentralized trading market in which autonomous agents and people can consume and provide services. The author defines this concept as "robonomics". This AIRA method suggests rejecting the principle of centralized robot control to provide decentralized communication between robots and humans, and using blockchain-based smart contracts as the basis for these communications. Because responsibility depends on real-world processes, there is no guarantee that agents will always be able to execute them correctly. This may be caused by the service provider because of (1) intentional fraud or (2) incorrect behavior due to failure. For the first question, AIRA developers believe that a reputation model can be developed and integrated into a consensus protocol that will reflect the level of trust in the agent in the blockchain information. Therefore, consumers can rely on this information to select service providers. For the second question, the AIRA project still needs technical and theoretical solutions, which is the focus of this article. Figure 2: Our experiment in the Duckietown environment. Duckiebot performs a task by following the order of the tags in the responsible smart contract and recording the observed tags in the log, which is verified by the verifier after the mission is over, and eventually passes through the "city." In this study, we focused our attention on agents whose behavior can be described by non-deterministic finite state automata (which can also be referred to as agent-based systems). For these agents, we provide a completely new method of verification of responsible execution, enabling the detection of a malfunctioning agent. It works by assuming that the result of a failed service provider is inconsistent with its behavioral model and results in automatic suspension of purchases. The verification method is based on a formal software verification method, Model Checking. Since mobile robots can be used in real-life situations such as logistics, transportation, etc., we provide a simple prototype implementation for the Duckietown environment, in which a mobile robot passes through the town, guided by a given tag sequence, in a At the end of the complete scenario, the task goal is achieved through its own behavior verification. Our verification method can either (1) be implemented directly into a consensus protocol or (2) implemented as part of a decentralized blockchain application. In the former case, assuming that the verification of the execution of the responsibility can be conducted in a decentralized manner at the verifier node (miner) and transaction, the confirmation service is provided in an appropriate manner and will be included in the new block. For example, it can be implemented with existing solutions that support pluggable consensus, such as Parity or Hyperledger. In the latter case, it is integrated into the AIRA method, where validation is performed by a third-party application that submits the validation results to the Ethereum smart contract. This study is a proof of concept for full-cycle responsibility implementation and covers the verification phase. With this notion of proof, it is important to evaluate the existing roboomics infrastructure and propose improvements. The important part of this research is the analysis of practical applications in real life. In this study, we consider a simple behavioral model that can be evaluated as the first level of a complex taxi service prototype and serve as a starting point for case studies. The complexity can be increased sequentially by continuously adding new components. Each component and case is the subject of further investigation. The outstanding issues are as follows: 1) Under normal circumstances, the user will ask the taxi service to pick them up from point A to point B. This should be defined as what is the goal of the full cycle (move to A then move to B)? And how many smart contracts we should create for this situation. 2) In our simple case, the user deals directly with robocar, which means that the user should know the car's location and address in advance. However, this is usually not the case. Some intermediate services need to connect to users and service providers. 3) As the number of IoT devices continues to increase and the road infrastructure continues to improve, we may turn this into a part of robeconomic. For example, cars can interact with infrastructure to establish the best route, and even get strong support from the infrastructure. 4) The AIRA Responsibility Validation Model assumes that the robot will not intentionally falsify the objective execution intentionally. This means that the service provider can choose to receive compensation, although it has not provided the corresponding service. Currently, a solution that may solve this problem is to introduce “recordersâ€, for example, which can record the fact that an agent appears at a specific place within a certain time in the blockchain. This information can be taken into account during the log verification process. We should establish a complete process description and economic model: Someone should pay for this data. Obviously, complex agent behavior needs to be improved through the modeling and inspection framework: • The main drawback of the model verification method is that for agents based systems, the number of states will increase with the number of variables and show a growth trend. This means that not all models can be physically processed, so a mechanism is needed to limit the complexity of the model. • When the probabilistic model is more applicable than the nondeterministic model, more work must be done to expand this method. In this case, Probabilistic Model Checking can be used. • The inspection framework can also be enhanced. In particular, an implementation of such a tool that enables automatic generation of high-level code from a Model Checking model and integration into service development projects. • Use the new attribute type to make the attribute generation tool enhanced. In addition, we can also extend the use of tools to customers, allowing them to build their own properties, for example, to allow service providers to check whether the submitted model meets their needs before performing responsibility. In this paper, we propose a concept for a distributed market model of autonomous agents and name them robonomics. For special agent-based systems, we have also introduced a new method of formal software verification technology based on model checking to solve the verification problem of responsibility execution, which helps to suspend the payment behavior to the failed service providers. It can be integrated with the reputation model in the blockchain consensus protocol. The verification process attempts to prove that the result submitted by the service provider after performing the operation corresponds to its pre-submitted behavior model. However, to pass an attribute as an input to a Model Checker, it must be converted to a Temporal Logic formula. In addition, the construction of a complex system model is also a complex task, and the model is suitable for the execution of a model checker. Therefore, we have established a framework that helps solve these two problems. The validation method was evaluated as part of a complex AIRA robonomics prototype that was implemented using the Duckietown project. The prototype implements a simple real-world case where a robot travels on a given route and carries out subsequent verification of responsibilities. Finally, we discussed the impact of the proposed solution on the future. Perkins 401-999KW Diesel Generator Perkins 401-999KW Diesel Generator,Perkins Shanghai genset,Perkins Shanghai Power Generator,Perkins Power Generator Set Shanghai Kosta Electric Co., Ltd. , https://www.generatorksd.com