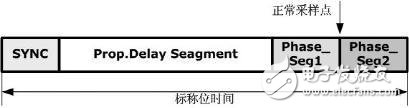
The CAN communication uses synchronous data transmission. The CAN controller will continuously operate in the bit synchronization process. However, different data communication systems have different requirements for bit synchronization. In order to meet the requirements, we must go deeper. To explore another concept called the specification of the time period. The specification of the time period is determined according to the requirements of the data communication system. The retention time (phase buffer segment) for resynchronization must be kept to a minimum if the maximum bus length is to be achieved at a specific bit rate or the shortest latency (maximum bit rate) for a given bus length. When the time buffer segment is set to the minimum value, it means that only the phase error of |e|=1 can be corrected in one resynchronization. Therefore, the requirements for bit synchronization are very high. To meet such requirements, only a precise quartz crystal can be used (the error of the quartz crystal is usually less than 0.1%). Figure 1 shows the specifications for the locating period (the bit rate and bus length product are the maximum). Such requirements are mainly applied to industrial automation systems. If the bit rate and bus length requirements are not high, the product of the bit rate and the bus length is thus reduced, and the time buffer segment for resynchronization is extended. Thus, according to the maximum possible sync jump width, the phase error of |e|=4 can be corrected in one resynchronization. Therefore, a more economical ceramic oscillator can be used. Figure 2 shows the bit timing specifications for the maximum oscillator error in automotive electronics. Figure 2 Specifications for the time period (for maximum oscillator error) Usually the specification of the bit timing is first determined by the required bit rate. The bit time must be an integer multiple of the system clock period. The bit time tbit=n&TImes;tq (n=4..25, tq is the amount of time). One way to determine the bit timing parameters is to first determine the length of the transmission segment, so the maximum bus length and maximum internal delay time must be considered. The round trip delay time is converted to the number of corresponding time quantities and rounded to an integer multiple of tq. Since the length of the sync segment is 1 tq. Then the length of the remaining two phase buffer segments is (tbit-tprog_seg-tq). If the number of remaining time units m=(tbit-tprog_seg-tq)/tq is an even number, the lengths of the two buffer segments are the same, if it is an odd number, tphase-seq2=tphase_seq1+tq. You must also pay attention to the minimum nominal length of Phase_Seg2. Since this segment cannot be shorter than the data processing time of the CAN controller (this time depends on the implementation, between 0 and 2 tq). The sync jump width (SJW) is set to its maximum value Min{4, tphase_Seg1/tq}. The allowable error of the oscillator is determined according to the two equations below. Formula one: Df ≤ tSJW / (20&TImes;tBit) Where: tBit nominal bit time tSJW resynchronize jump width Formula 2: Df ≤ min{ t Phase_seg1, t Phase_seg2} / (2&TImes;( 13&TImes;tBit-t Phase_seg2)) Product categories of Stylus Pen For Huawei, which is just for Huawei M5, M6, C5, Matebook E, other tablets can not be used. Pls check with your huawei tablet model before ordering. We have advanced production equipment, strong software and hardware development capabilities. We have the perfect after-sale service and technical support. Looking forward to our cooperation. Stylus Pen For Huawei,Surface Pen,Touch Pen,Touch Screen Pen Shenzhen Ruidian Technology CO., Ltd , https://www.szwisonen.com